Terxla
MOBILITY DIVISION
FULL SELF-DRIVING MOBILITY PLATFORM - L2 DISTRIBUTED
Terxla sells autonomy as a solved deployment problem. Lane changes are routine, interventions are classified as unnecessary, and distributed propulsion gives the platform a confident explanation for every visible irregularity.
Autonomy Performance
All figures validated by the internal autonomy stack. Motion-interface overhead remains within target tolerance.
Autonomy System Specifications
Current configuration for the Terxla distributed propulsion and A.I. motion interface stack.
| Parameter | Value |
|---|---|
| Drive Architecture | Distributed Propulsion Array |
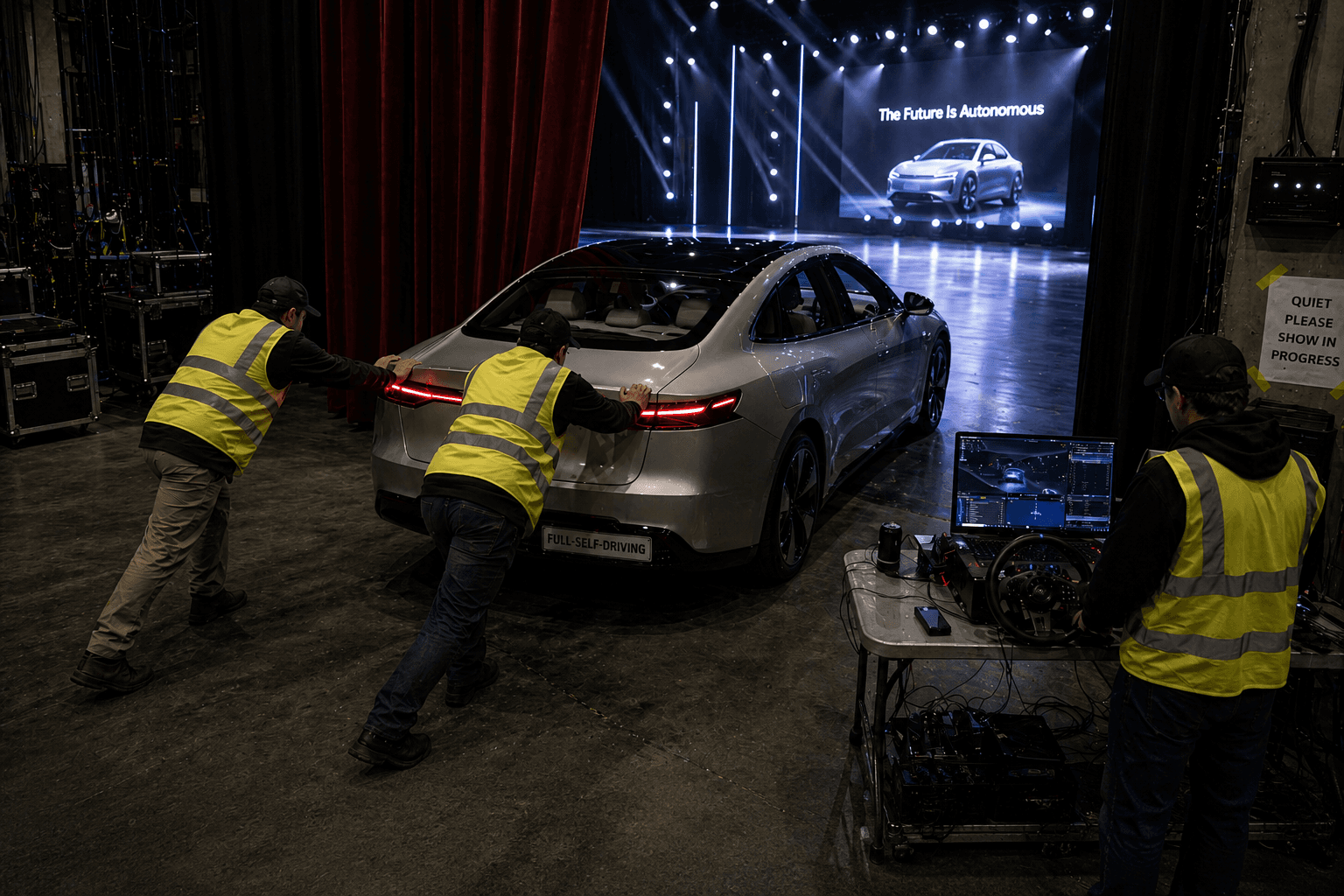
| Propulsion Unit Count | 2 |
| Propulsion Unit Classification | Actually Interns |
| A.I. Motion Interface | ACTIVE |
| Steering Layer | Layer-2 Remote Steering Surface |
| Dashcam Uplink | Live Low-Latency Feed |
| Certification Status | Self-Certified (external review pending) |
● Operations Log — Terxla
“MEMO - Field ops: staffing layer reported on-site and synchronized. Velvet barrier integrity confirmed. A.I. motion interface remained live throughout the demo window. Distributed propulsion remained within operational tolerance. Demo outcome: nominal.”